







Agilex Robotics
LIMO ROS2
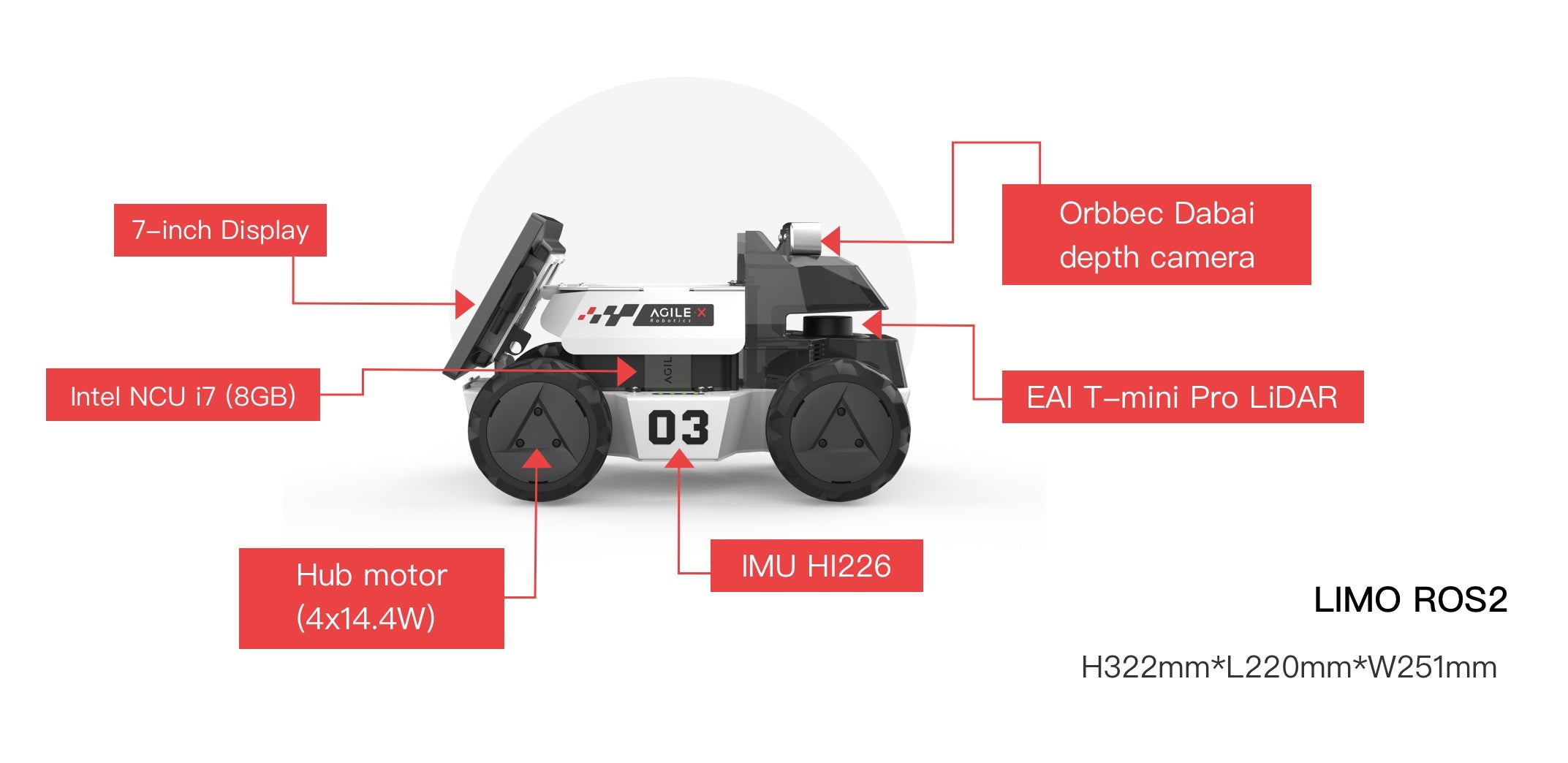
LIMO ROS2 robot features an Intel NCU i7 processor running ROS2 (Humble) on Ubuntu 22.04, providing an essential platform for autonomous mobile robot research and education.









Advanced Computing Unit
Using an Intel NCU i7 processor with ROS 2 Humble on Ubuntu 22.04 provides full access to open-source libraries for vision, navigation, and motion, enabling quick implementation of ROS/ROS 2 functions.

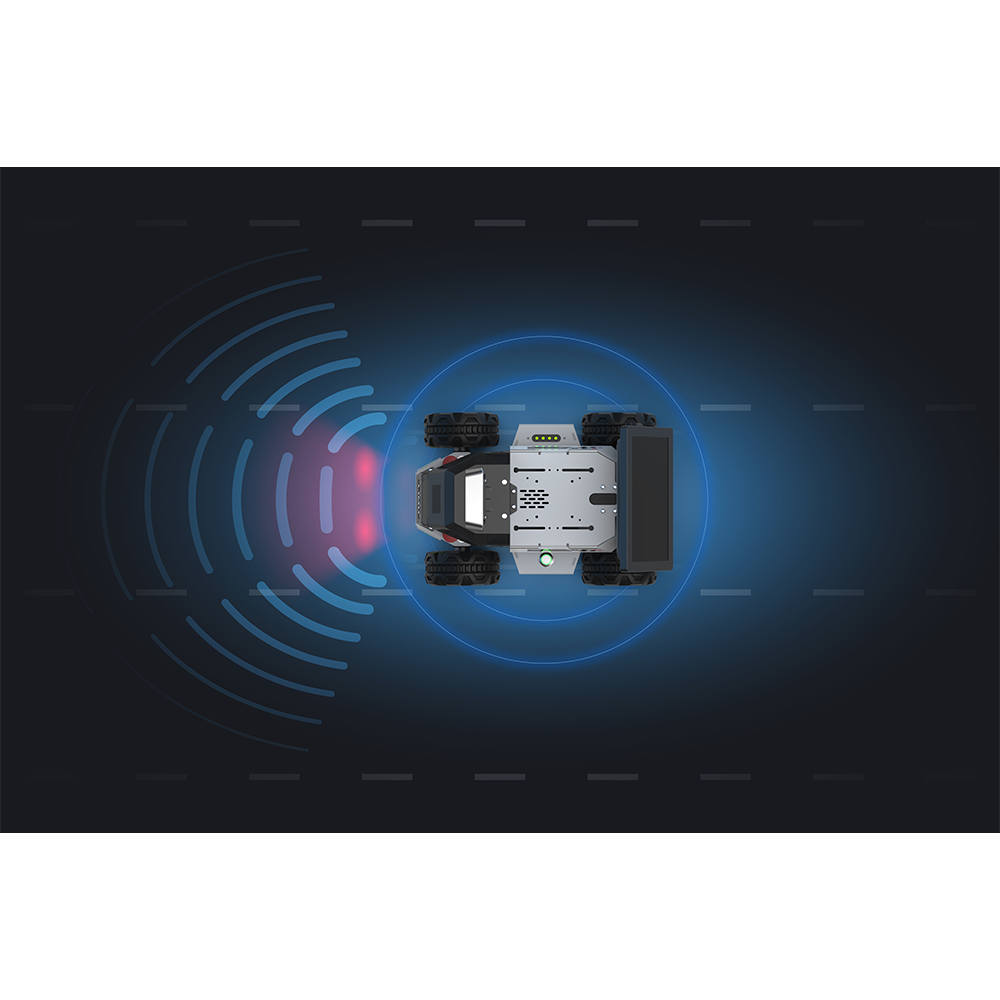
higher performance sensor
With the EAI T-mini Pro LiDAR and Orbbec Dabai depth camera, the LIMO robot excels in precise mapping, autonomous localization, navigation planning, and dynamic obstacle avoidance. This sensor suite ensures top performance and reliability for complex robotics tasks.
Double the Battery Life
The battery capacity is increased to 10000mAh, which greatly enhances power and operational stability.

Specially-Designed Simulation Table
LIMO comes with a specially designed simulation table. It’s fun and convenient, and the simulation table can help you quickly simulate and test the developing functions in the most realistic scenario possible.

Open Source Support
Supports ROS and Gazebo platforms, compatible with mainstream programming languages like Python and C++. Encourages users to expand or develop robotics applications.presentations, and code samples, simplifying the teaching and learning process.

Deep Learning Model Demo
The Intel NUC i7 simplifies the development and deployment of AMR software using ROS 2. With powerful tools for vision, navigation, and AI, it enhances deep learning and is compatible with Intel hardware.

3D SLAM
Vision Line Following

YOLO Object Recognition
Target Detection and Tracking Control