









AgileX Robotics
COBOT Magic
Cobot Magic is an open-source robotic system that uses Mobile ALOHA for controlling both a mobile base and a robotic arm. It includes an indoor AGV base, a robotic arm, and a deep camera, supporting tasks from pick-and-place to complex operations like cooking and organizing objects.





Mobile ALOHA is a whole-body remote operation data collection system developed by Zipeng Fu, Tony Z. Zhao, and Chelsea Finn from Stanford University.


Features
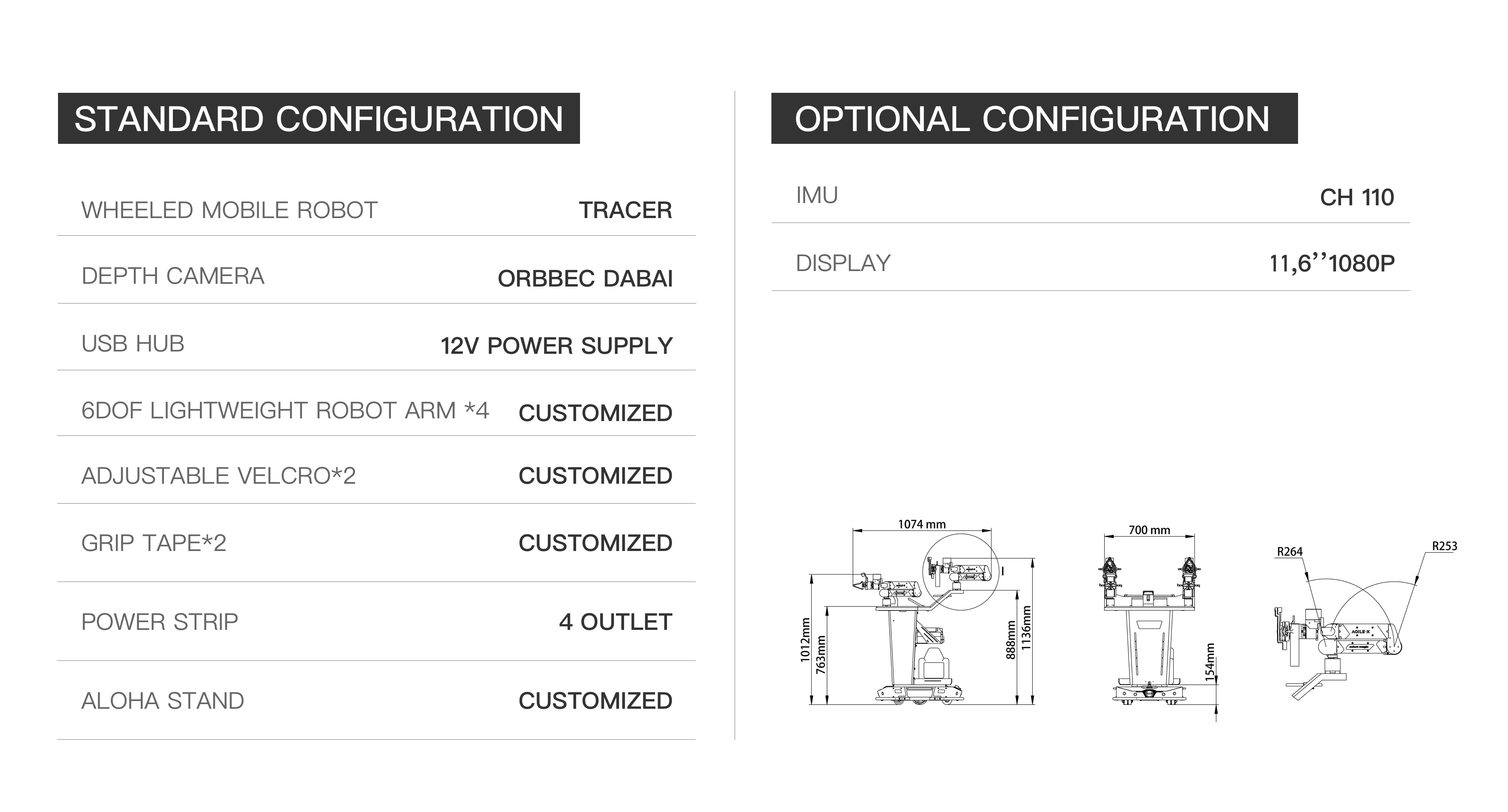
Its hardware is based on 4 robotic arms , equipped with 2 wrist cameras and 1 top camera, and a mobile base from AgileX Robotics Tracer differential motion robot.
Advanced and Cost-Effective Robotic Automation
Cobot Magic integrates the Mobile ALOHA code and offers better configurations and cost savings. It features stronger robotic arms and powerful industrial computers, excelling in complex tasks like dual-arm operations. This makes Cobot Magic a versatile tool for both industry and research.

Simulation Data Training
Set up the Mobile Aloha software
environment for data and model training across simulated and real-world environments.
Data Collection
Users can flexibly accomplish a wide range of everyday tasks by controlling the teaching robot arm, from basic pick and place operations to more sophisticated skills.
Unleash the Bimanual MobileManipulation
Navigate cluttered spaces, watering flowers, opening boxes, grasp and manipulate delicate objects, and even cook a simple meal.