










Agilex Robotics
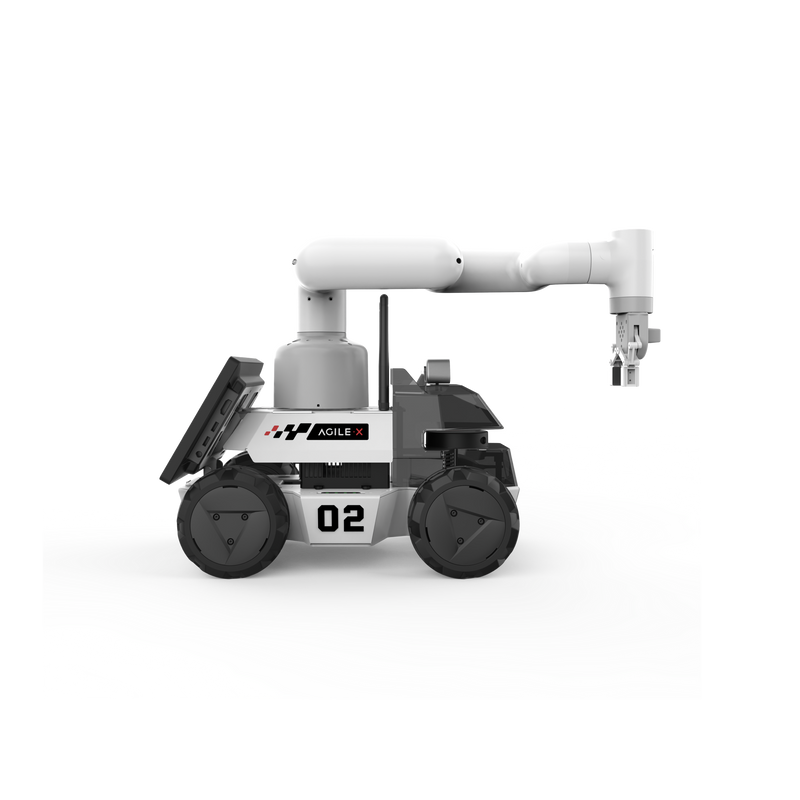
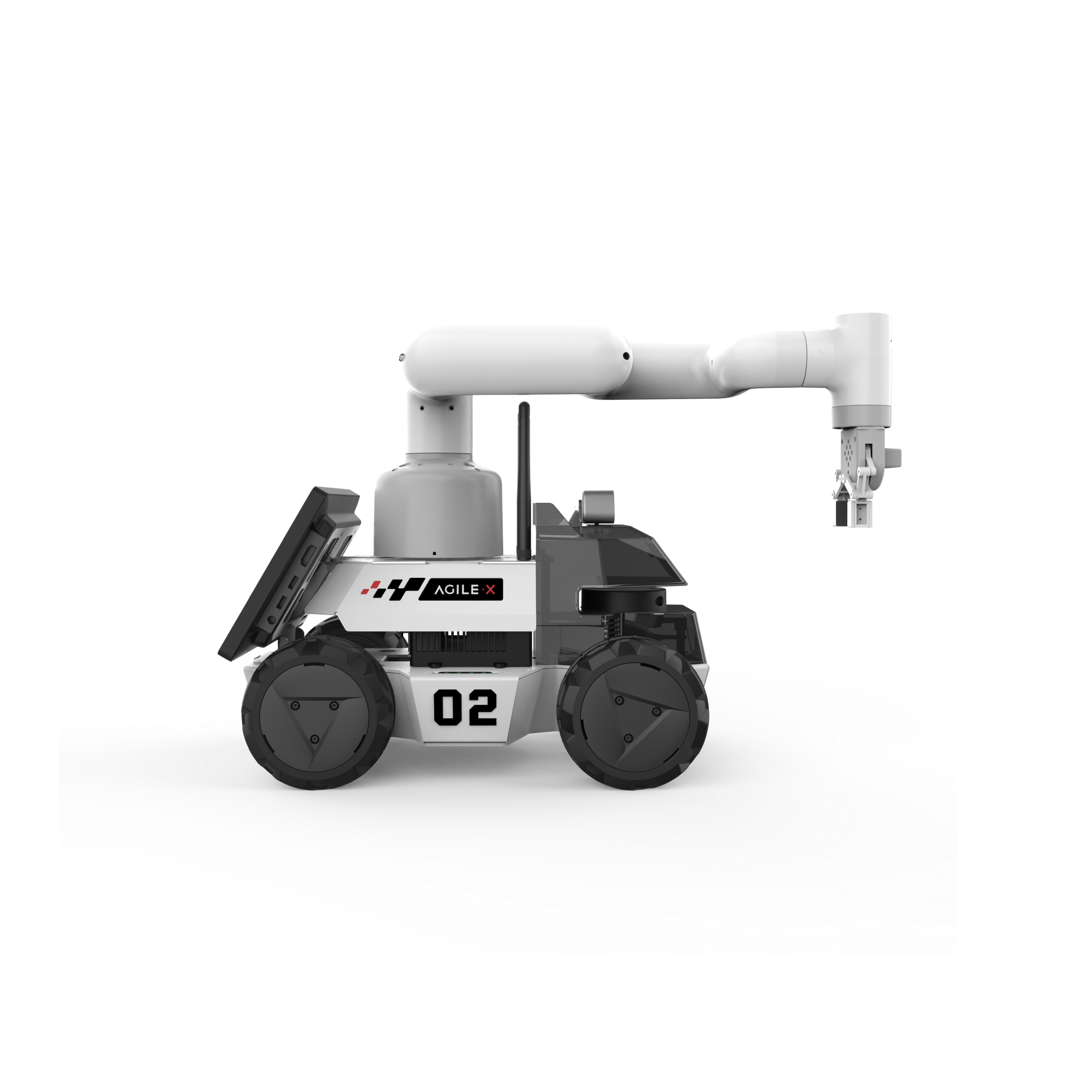
LIMO COBOT
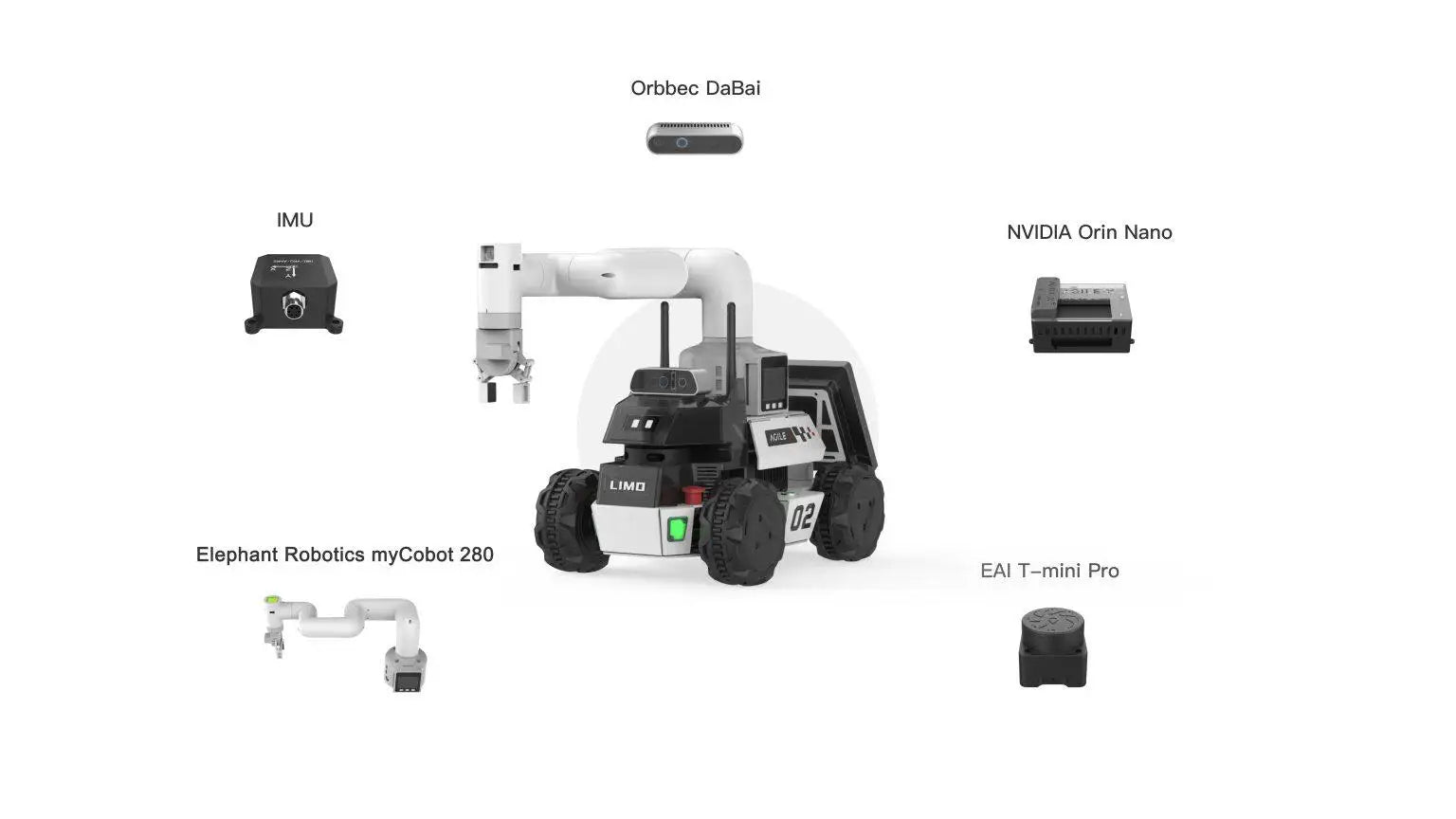
LIMO Cobot integrates Mycobot 280 M5 and Nvidia Orin Nano for autonomous features. It supports navigation, obstacle avoidance, mapping, mobile grasping, and visual recognition. it ideal for education, competitions, and training.
sales@agilex.ai
sales@agilex.ai

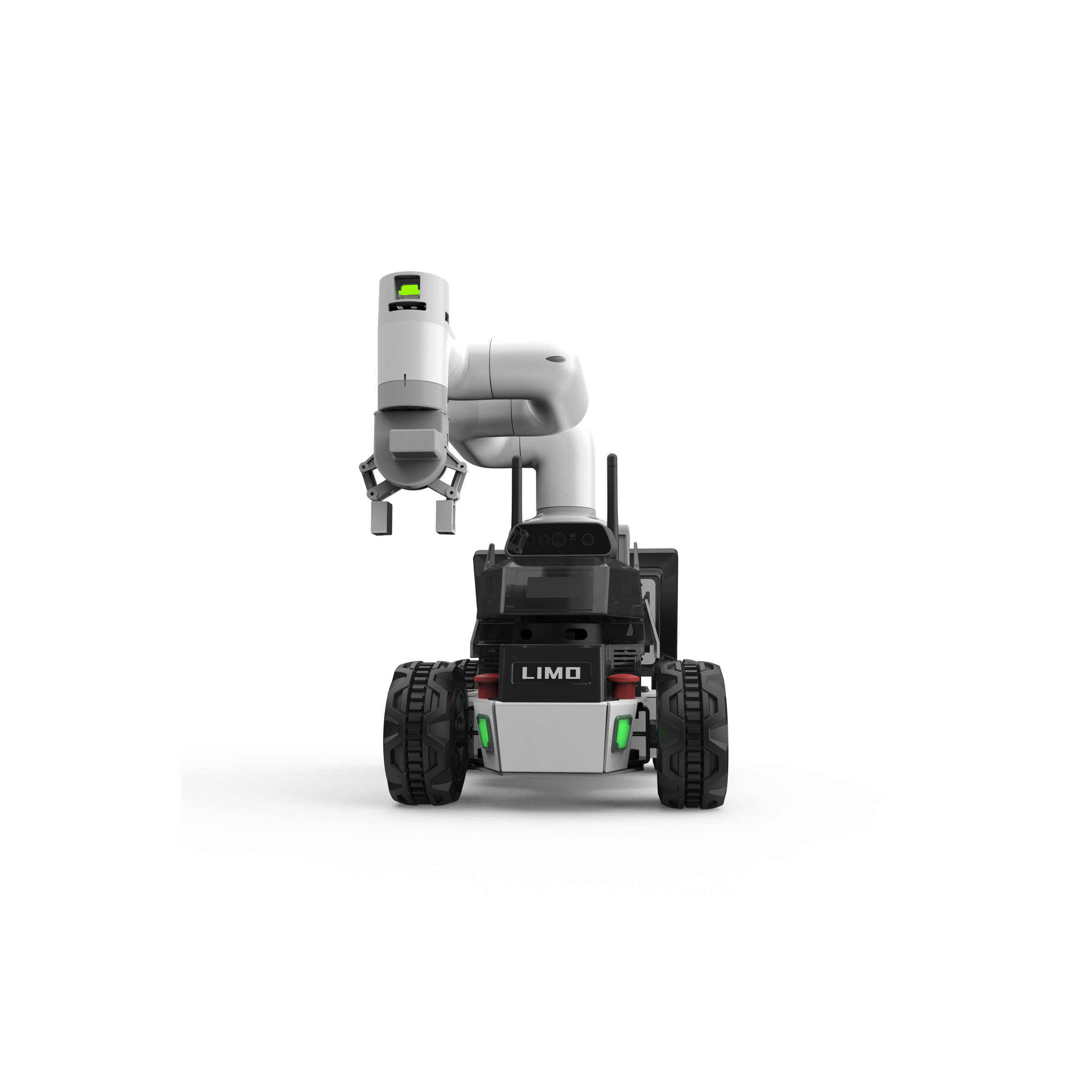








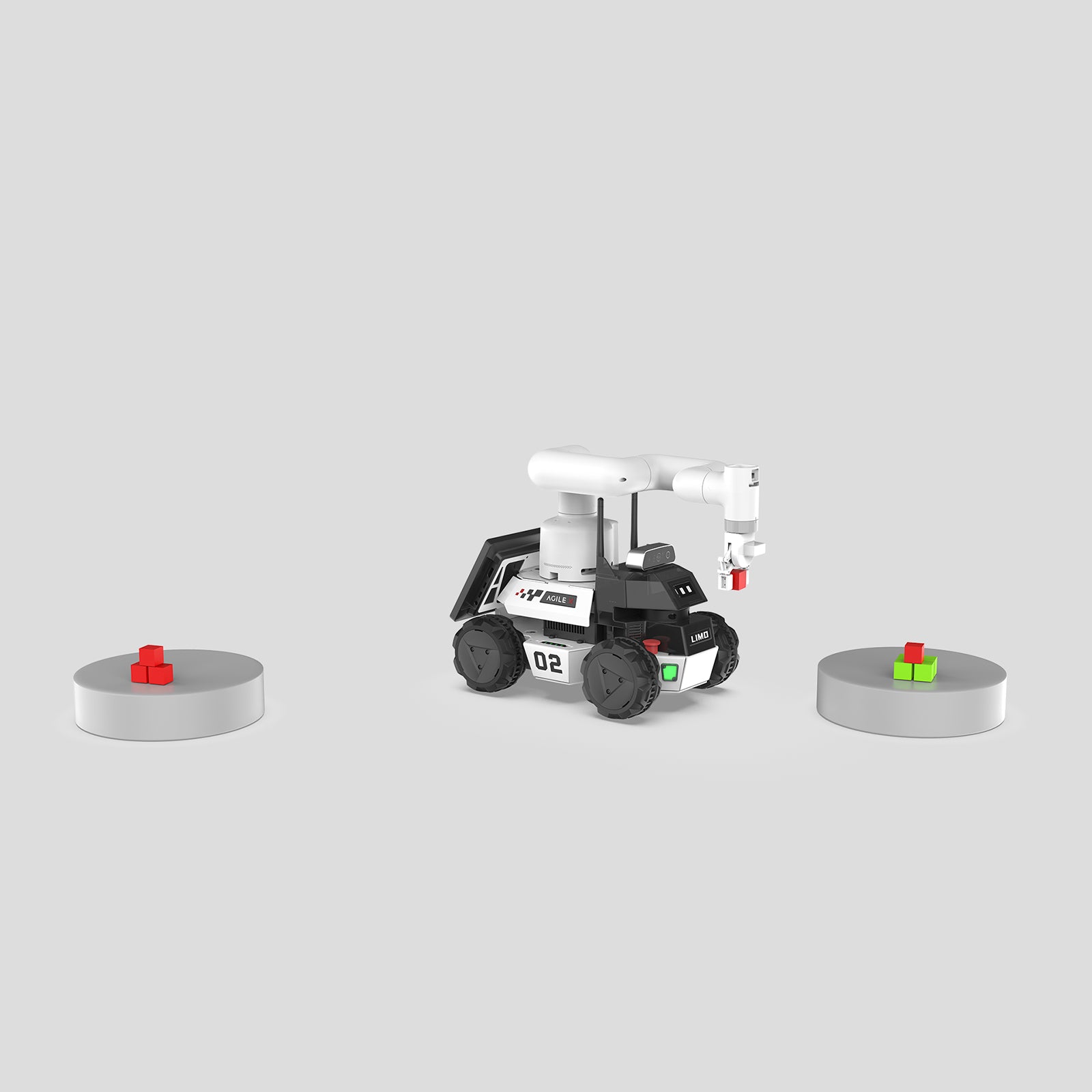
Mobile Grasping
LIMO Cobot features a 6-DoF robotic arm supporting various end-effectors, allowing for precise mobile grasping to fulfill diverse task requirements
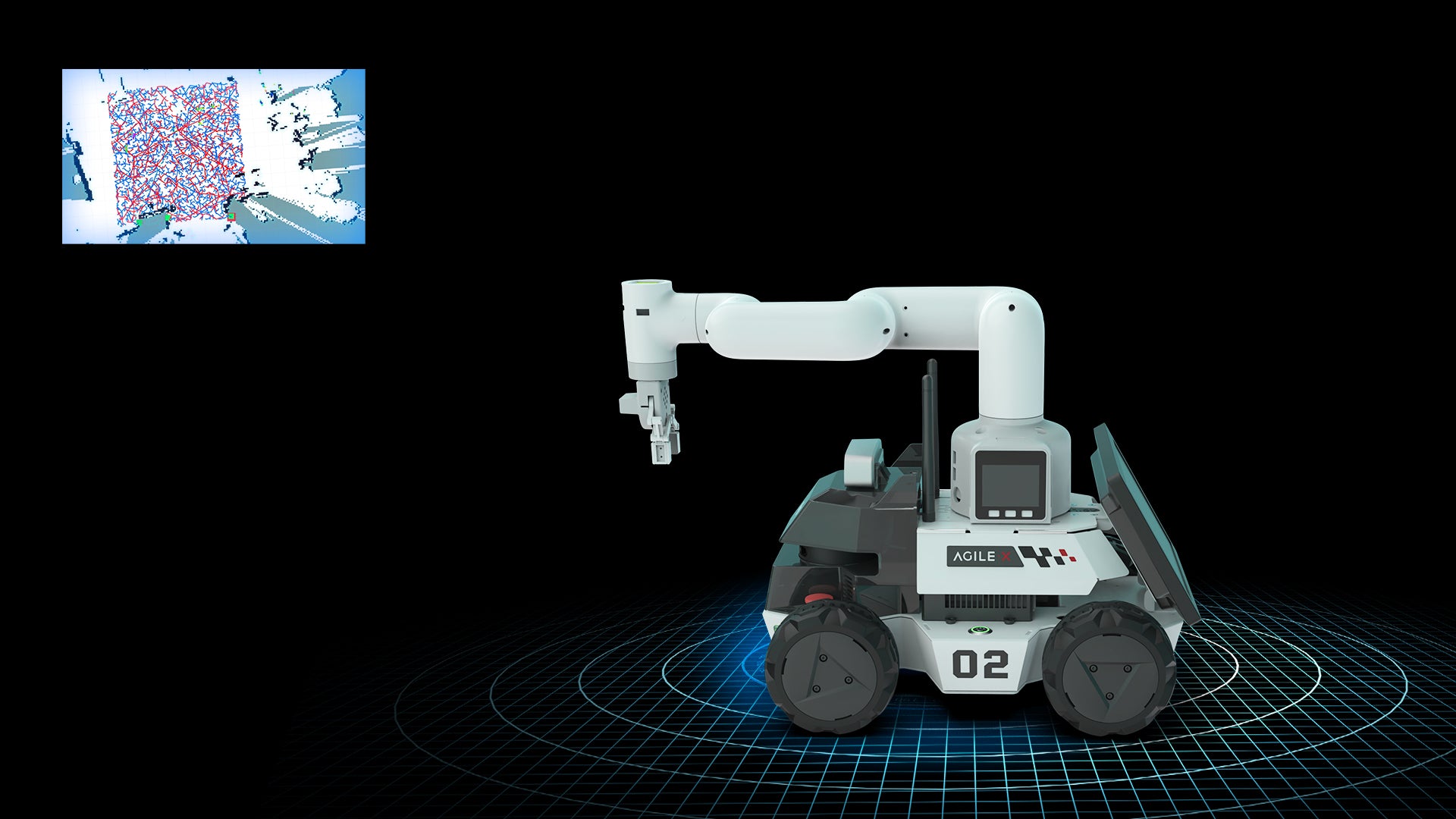
Autonomous Mapping
LIMO Cobot autonomously senses and constructs precise environmental maps, offering accurate data support for navigating complex spaces.
Obstacle Avoidance
LIMO Cobot can intelligently perceive its surrounding environment and flexibly navigate to avoid obstacles, ensuring safe task execution.

Open Source Support
Supports ROS and Gazebo platforms, compatible with mainstream programming languages like Python and C++. Encourages users to expand or develop robotics applications.presentations, and code samples, simplifying the teaching and learning process

Deep Learning Model Demo
Demo of Deep Learning Models, ROS-Based Mapping, and Navigation showcases how to utilize Jetson Nano for running AI models and integrating with ROS to achieve effective environmental mapping and robot navigation

3D SLAM
Vision Line Following

YOLO Object Recognition
Target Detection and Tracking Control